استخدام حساسات الاشعة تحت الحمراء للروبوت
نبذة:
حساسات الاشعة تحت الحمراء تستخدم في الروبوت لتجنب الخطوط البيضاء على الارض. لقد استخدمتها في روبوتي لتجنب تخطي حدود الملعب في ملعب كرة القدم (لانني ابني روبوت يلعب كرة القدم في المسابقة العالمية السنوية كما شرحت من قبل =))تركيب الحساس
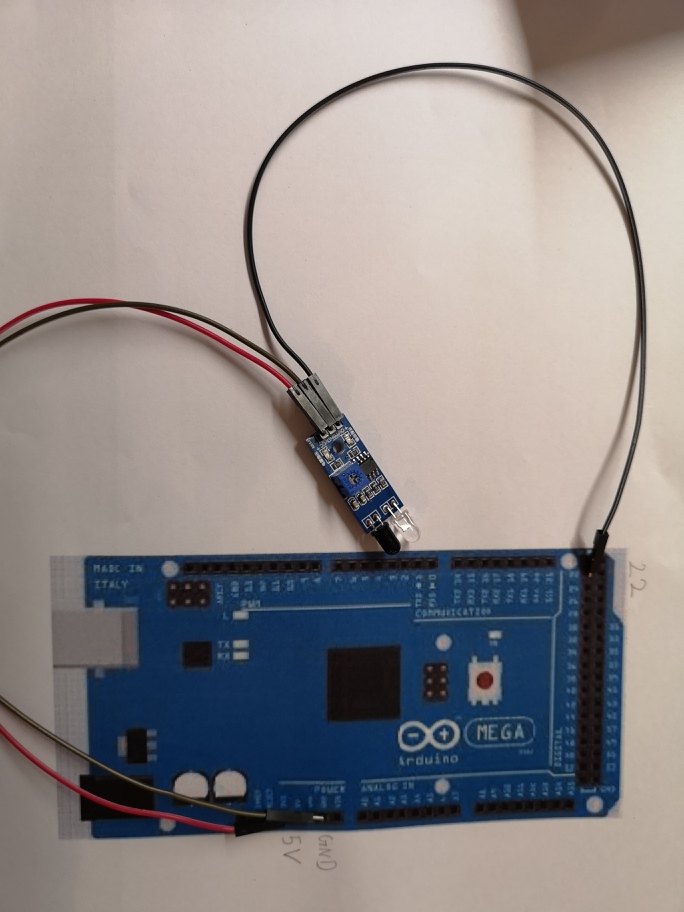
- حساسات الاشعة تحت الحمراء لها ثلاثة جهات توصيل. الاول يوصل بال5V , الثاني يوصل بالGND, و الثالث يوصل باي دبوس في الاردوينو (لقد استخدمت دبوس 22), كما في الصورة.
كتابة البرنامج
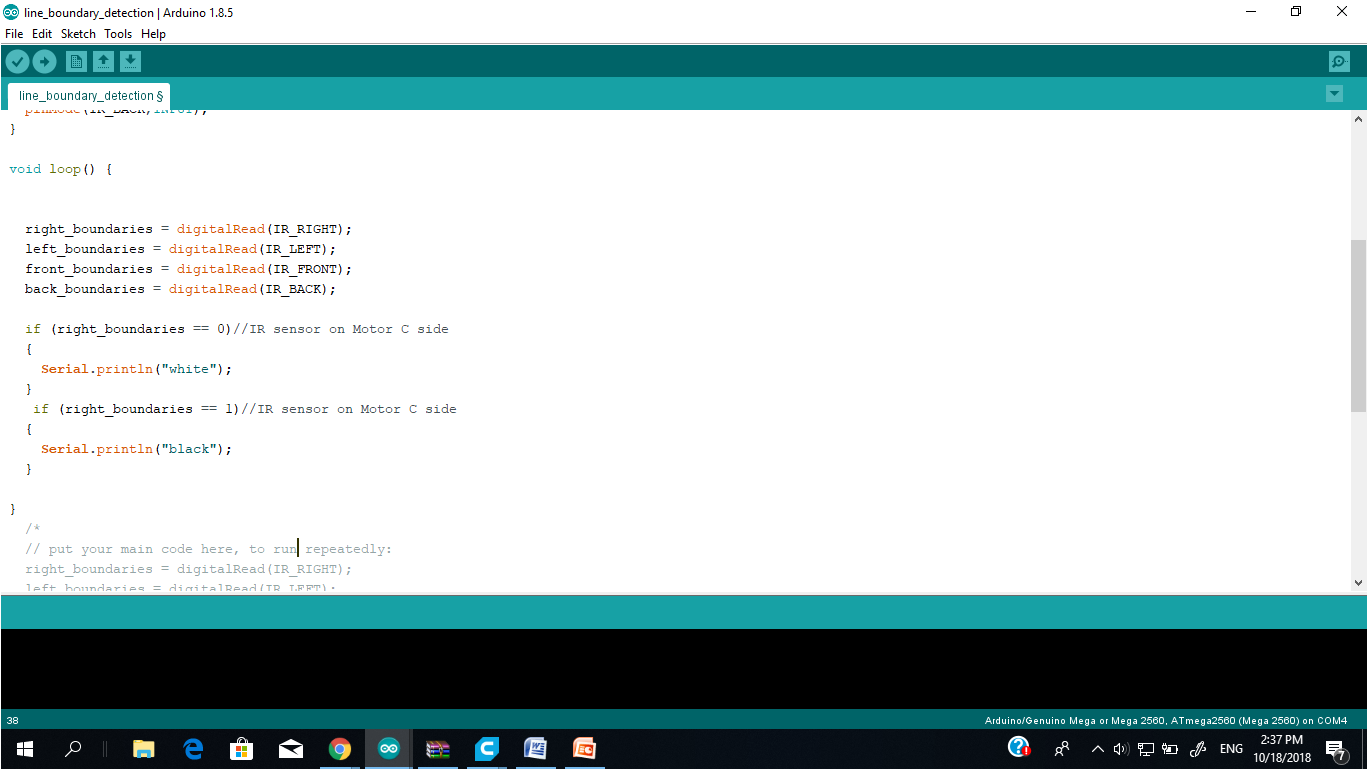
- البرنامج الذي كتبته التالي:
;0 const int IR_RIGHT = 3
;const int IR_LEFT = 48
;const int IR_FRONT = 50
;const int IR_BACK = 52
;int right_boundaries
;int left_boundaries
;int front_boundaries
;int back_boundaries
}()void setup
;(Serial.begin(9600
;(pinMode(IR_RIGHT,INPUT
;(pinMode(IR_LEFT,INPUT
;(pinMode(IR_FRONT,INPUT
;(pinMode(IR_BACK,INPUT
{
}()void loop
;(right_boundaries = digitalRead(IR_RIGHT
;(left_boundaries = digitalRead(IR_LEFT
;(front_boundaries = digitalRead(IR_FRONT
;(back_boundaries = digitalRead(IR_BACK
if (right_boundaries == 0)//IR sensor on Motor C side
}
;(“Serial.println(“white
{
if (right_boundaries == 1)//IR sensor on Motor C side
}
;(“Serial.println(“black
{
{
- لتحميل ملفات البرمجة للاردوينو, يمكنكم الضغط على الرابط: هنا
لقد قمت بتركيب اربعة حساسات في كل جهة من الروبوت لتجنب الخروج من الخطوط البيضاء لملعب كرة القدم. و شكرا!

شرح مميز
👍🏻
عمل رائع ننتظر المزيد من الابداع
ابدعتم
شكرا على الجهد