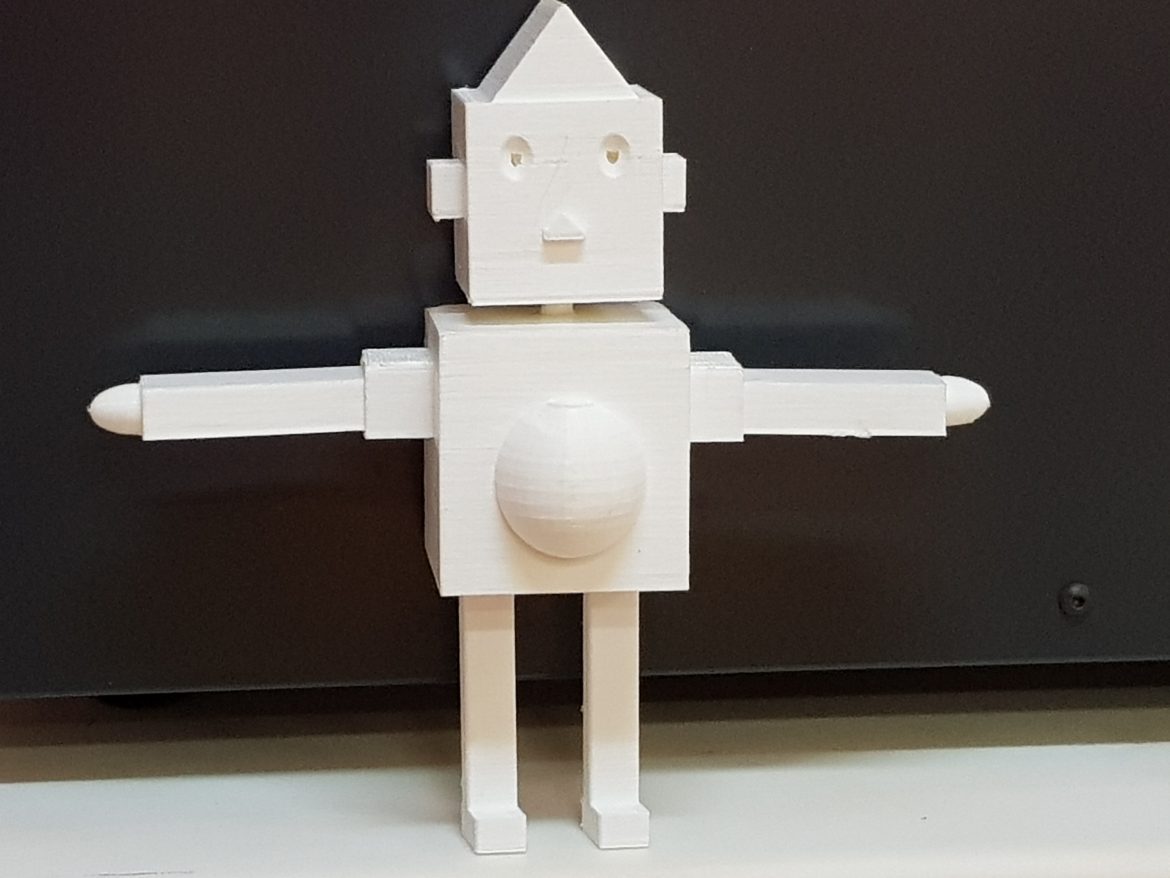
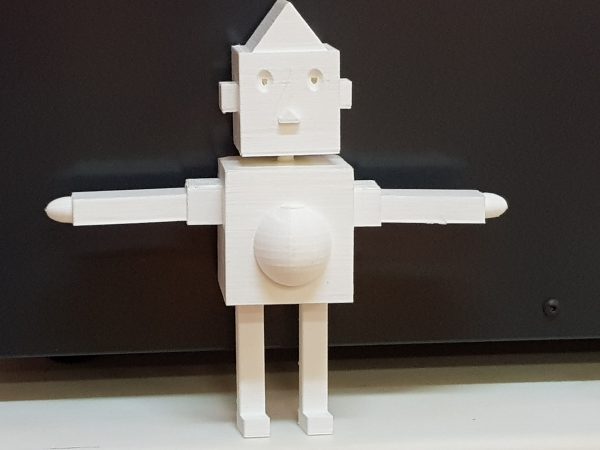
رجل آلي
نبذة:
مدرسة ثانوية حاكمة أبوعريش بمنطقة جيزان إشراف المعلمة / امل العموديالشرح
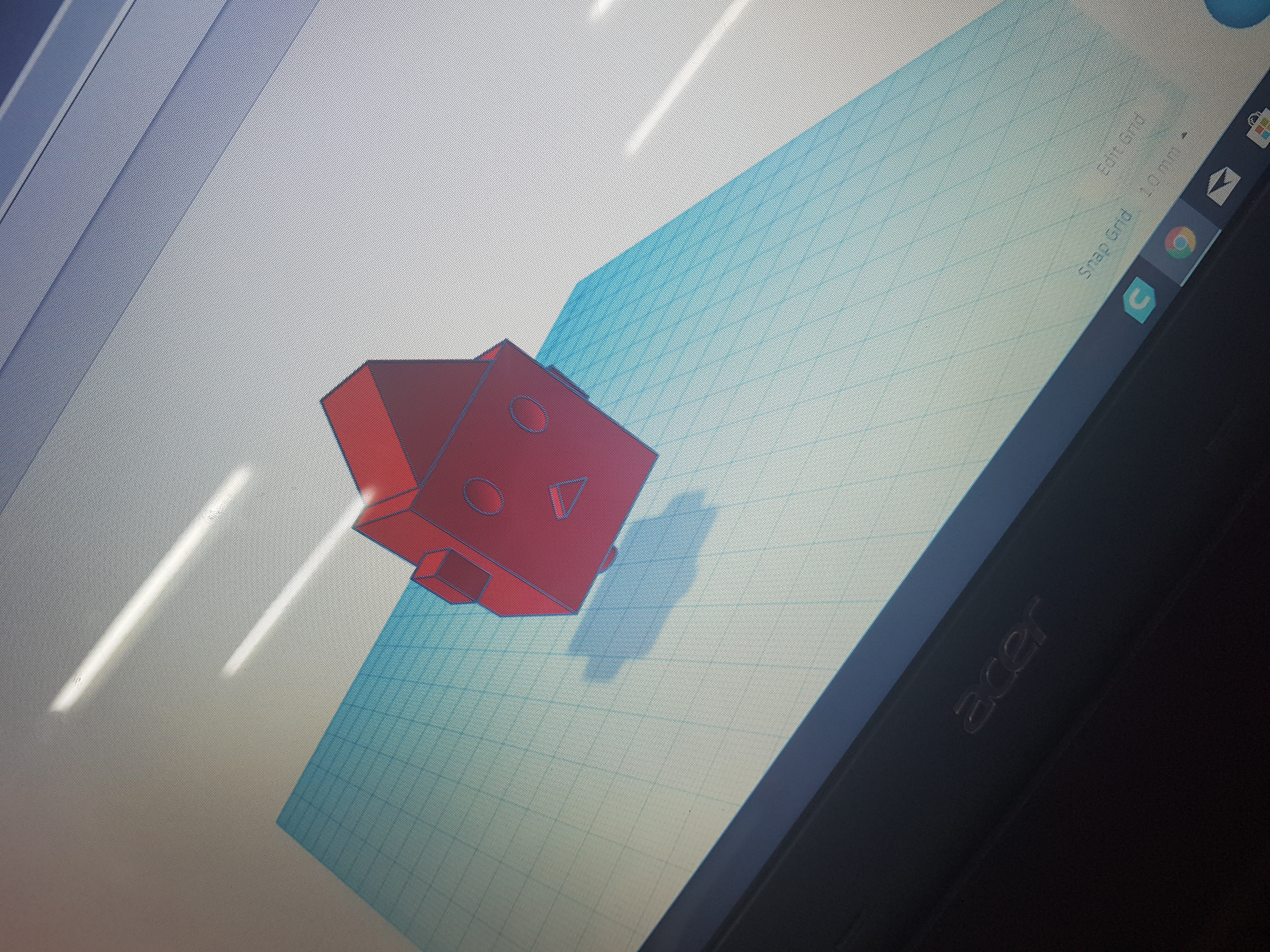
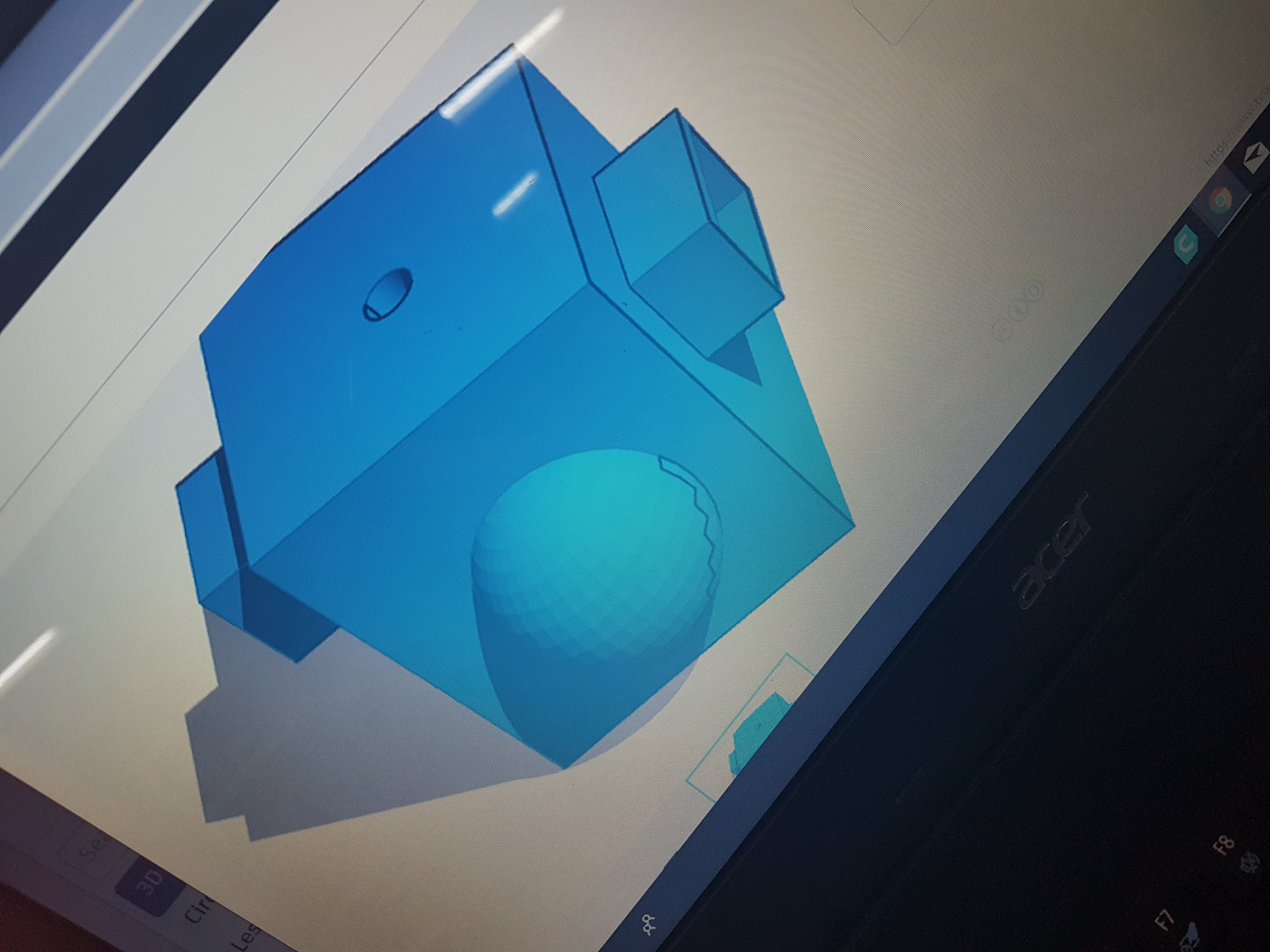
عمل تصميم لأجزاء الرجل الآلي في Tinkercad ثم طباعته باستعمال البروسا
عمل برمجة التحكم بحركة السيرفو باستعمال الريموت
البرمجة
#include <IRremote.h> //must copy IRremote library to arduino libraries
#include <Servo.h>
#define plus 0xA3C8EDDB //clockwise rotation button
#define minus 0xF076C13B //counter clockwise rotation button
int RECV_PIN = 2; //IR receiver pin
Servo servo;
int val; //rotation angle
bool cwRotation, ccwRotation; //the states of rotation
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
servo.attach(9); //servo pin
}
void loop()
{
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
irrecv.resume(); // Receive the next value
if (results.value == plus)
{
cwRotation = !cwRotation; //toggle the rotation value
ccwRotation = false; //no rotation in this direction
}
if (results.value == minus)
{
ccwRotation = !ccwRotation; //toggle the rotation value
cwRotation = false; //no rotation in this direction
}
}
if (cwRotation && (val != 175)) {
val++; //for colockwise button
}
if (ccwRotation && (val != 0)) {
val–; //for counter colockwise button
}
servo.write(val);
delay(10); //General speed
}

ماشاء الله تبارك الله